موتور DC (مخفف Direct Current) نوعی موتور الکتریکی است که برای تبدیل انرژی برقی به حرکت مکانی استفاده میشود. در این نوع موتور، جریان الکتریکی در یک جهت ثابت جریان دارد، به عبارت دیگر، جریان الکتریکی دائماً در یک جهت جریان مییابد و پلاریته آن تغییر نمیکند. این نوع موتورها بر اساس اصول الکترومغناطیسی کار میکنند و به عنوان یکی از انواع موتورهای الکتریکی متداول محسوب میشوند.
عملکرد موتور DC بر اساس قانون لورنتز نیروی لورنتز (قانون نیوتن از جمله) است که بیان میکند که یک موجود در حالتی که تحت تأثیر یک میدان مغناطیسی قرار دارد و جریان الکتریکی از طریق آن عبور میکند، نیرویی در جهت عمودی به هر دو جهت میدان مغناطیسی تولید میکند. این نیرو باعث حرکت و چرخش موتور میشود.
موتورهای DC در انواع مختلفی مانند موتورهای برسی (Brushed) و موتورهای بدون برس (Brushless) وجود دارند، که هر کدام ویژگیها و کاربردهای خاص خود را دارند. موتورهای DC به دلیل ساختار نسبتاً ساده، کنترل آسان، و قابلیت تغییر سرعت و جهت چرخش به راحتی، در صنایع مختلفی از جمله رباتیک، اتوماسیون صنعتی، خودروسازی، الکترونیک و بسیاری از دستگاههای الکترومکانیکی مورد استفاده قرار میگیرند.
درایوهای کنترل دور نیز در کاربردهای خاص خود، مانند کنترل دور موتورهای DC یا موتورهای القایی یک فاز، قابل استفاده هستند.
اجزای تشکیل دهنده موتور DC
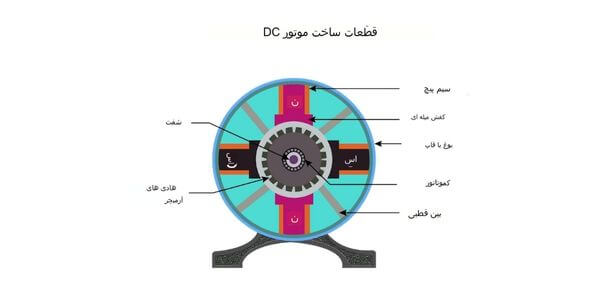
موتور DC (موتور جریان مستقیم) از چندین اجزاء اصلی تشکیل شده است که همچنین برخی اجزاء فرعی نیز ممکن است در طراحی و ساخت آن استفاده شوند. این اجزاء اصلی عبارتند از:
1. قاب یا بدنه (Frame/Chassis): قاب یا بدنه موتور، ساختار اصلی آن را تشکیل میدهد و اجزای دیگر به آن متصل میشوند. قاب معمولاً از جنس فلزی است و برای حمایت از سایر اجزاء و ایجاد یک ساختار محکم استفاده میشود.
2. سر بالا و پایین (End Bells): این اجزاء در دو سر موتور قرار میگیرند و به قاب متصل میشوند. آنها حفاظت و حمایت از قسمتهای داخلی موتور را فراهم میکنند.
3. شافت (Shaft): شافت موتور، قسمتی است که چرخش انرژی الکتریکی به حرکت مکانی تبدیل میشود. در موتورهای DC، شافت به وسیله کاموتاتور (Commutator) متصل به مارش موتور و اتصال به آرمچر متحرک میشود.
4. آرمچر (Armature): آرمچر جزء اصلی موتور DC است که شامل هسته آهنی و همچنین پیچهای متحرک (Coil) میشود. جریان الکتریکی از طریق پیچهای آرمچر میگذرد و با تولید میدان مغناطیسی، باعث چرخش شافت میشود.
5. کاموتاتور (Commutator): کاموتاتور یک قطعه دوار است که با حرکت آرمچر مشترک شده و با تغییر جهت جریان بین پیچهای آرمچر و میدان مغناطیسی، جهت چرخش موتور تغییر میکند.
6. مغناطیس دائمی (Permanent Magnet): در موتورهای DC، مغناطیس دائمیای وجود دارد که میدان مغناطیسی ثابتی ایجاد میکند و به همراه میدان مغناطیسی ایجاد شده توسط آرمچر باعث چرخش شافت میشود.
7. بوشینگها و رولمانها (Bearings): این اجزاء برای حمایت از شافت و کاهش اصطکاک در چرخش شافت استفاده میشوند.
8. پیچهای الکتریکی (Coils/Windings): پیچهای الکتریکی حول آرمچر قرار میگیرند و با اعمال جریان الکتریکی به آنها، میدان مغناطیسی تولید میشود که باعث چرخش شافت میشود.
همچنین، در برخی انواع موتورهای DC، اجزاء فرعی دیگری مانند براشها (Brushes)، رینگها (Rings) و … نیز به منظور بهبود عملکرد و کارایی استفاده میشوند.
اصول کار موتور DC
در یک موتور DC برق برای ایجاد میدان مغناطیسی در قطبهای میدان، از طریق جریان القایی DC فراهم میشود. این جریان القایی باعث تشکیل یک میدان مغناطیسی DC ثابت میشود.
برق برای تغذیه سیمپیچ آرمیچر (رسانا)، از طریق جریان DC فراهم میشود که از جاروبکها و کموتاتور عبور میکند.
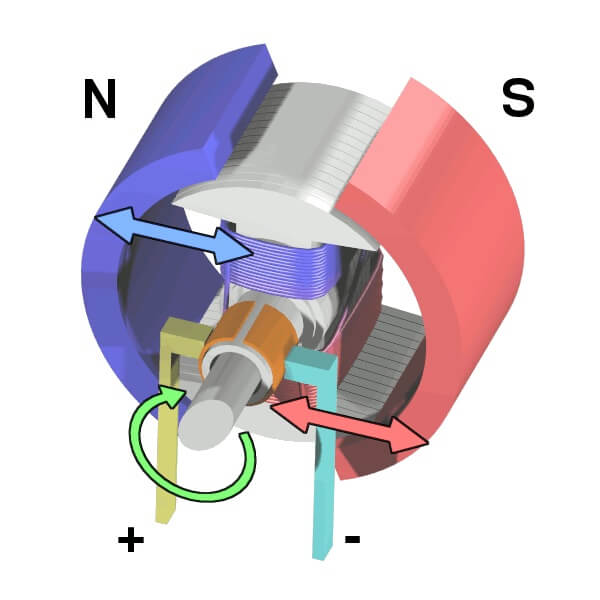
طبق شکل زیر و معادله نیروی لورنتس، وقتی یک رسانای حامل جریان در یک میدان مغناطیسی قرار گیرد، یک نیروی القایی در آن ایجاد میشود که سعی در جابهجایی رسانا دارد.
همه سیمپیچهای قرار گرفته حول یک موتور DC، تحت تأثیر این نیروها قرار دارند.
این نیروها باعث چرخش آرمیچر در جهت عقربههای ساعت میشوند.
بنابراین، آرمیچر یک موتور DC در جهت تولید گشتاور توسط موتور چرخش میکند.
برق برای تغذیه سیمپیچهای استاتور، از منبع خارجی فراهم میشود.
با ایجاد جریان در سیمپیچهای استاتور، یک میدان مغناطیسی یکنواخت در قطبهای استاتور ایجاد میشود.
جریان آرمیچر نیز توسط یک منبع خارجی یا استاتور تامین میشود و باعث ایجاد میدان مغناطیسی در آن میشود.
با برهمکنش میدانهای استاتور و آرمیچر، چرخش ایجاد میشود و انرژی الکتریکی به انرژی مکانیکی تبدیل میشود.
مقدار جریان عبوری و تعداد دورهای سیمپیچها، شدت میدان مغناطیسی را تعیین میکند. با تنظیم روشن و خاموش کردن منظم سیمپیچها، یک میدان دوار تولید میشود.
این میدانها توسط یک آهنربای دائمی یا سیمپیچ ایجاد میشوند و نیروی لازم برای چرخش آرمیچر تولید میکنند. خنککاری موتورهای DC با توان بالا معمولاً با تزریق هوا انجام میشود.
سرعت یک موتور DC با تغییر ولتاژ آرمیچر تغییر میکند و استفاده از مقاومت متغیر در مدار آرمیچر یا مدار میدان امکان کنترل سرعت موتورهای DC را فراهم میکند.
انواع موتور DC
موتورهای DC به سه دسته اصلی زیر تقسیم میشوند:
1. موتور جاروبکدار (Brushed DC Motor):
در این نوع موتور، یک سیمپیچ آرمیچر از طریق جاروبکها به منبع جریان (باتری یا منبع تغذیه) متصل میشود. جاروبکها کموتاتور را تغذیه کرده و جریان به سیمپیچهای آرمیچر ارسال میشود. این نوع موتورها ساختار سادهتری دارند اما به دلیل استفاده از جاروبکها ممکن است نیاز به تعویض دورهای جاروبکها و ترتیب کارهای نگهداری داشته باشند. آنها به عنوان موتورهای DC معمولی شناخته میشوند.
2. موتور بدون جاروبک (Brushless DC Motor یا BLDC):
این نوع موتورها بدون جاروبک کار میکنند و به جای آن از یک کنترل الکترونیکی پیچیدهتر برای تغییر جهت جریان ولتاژ استفاده میکنند. موتورهای BLDC معمولاً با کارایی بالا، سرعت قابل تنظیم، و عمر طولانی تری عرضه میشوند. آنها برای کاربردهایی که نیاز به دقت بالا و کنترل دقیق سرعت دارند، مناسب هستند.
3. سرو موتور (Servo Motor):
این نوع موتورها از یک بازخورد مکانیکی یا الکتریکی برای کنترل دقیق موقعیت و سرعت استفاده میکنند. سرو موتورها به دقت بالا و پایداری برای کاربردهایی مانند رباتیک، ماشینآلات CNC و دستگاههای پزشکی مورد استفاده قرار میگیرند. آنها میتوانند در دقت بالا موقعیتهای مورد نظر را حفظ کنند و به صورت دقیق به سیگنالها و دستورات کنترلی پاسخ دهند.
هر یک از این انواع موتورها ویژگیها و کاربردهای خاص خود را دارند و بسته به نیازهای مختلف، از یکی از آنها استفاده میشود.
مزایا و معایب موتور DC

مزایا
1. کنترل سرعت بهتر: موتورهای DC به راحتی قابل کنترل سرعت هستند و میتوانند به سرعتهای مختلف حرکت کنند. این ویژگی آنها را برای برنامههایی که نیاز به تغییرات سرعت فراوان دارند، مفید میکند.
2. توانایی تحمل بار زیاد: موتورهای DC معمولاً توانایی تحمل بارهای زیادی را دارند و در برخی کاربردها میتوانند بارهای سنگین را با موفقیت حمل کنند.
3. شروع نرم و جریان بالا در آغاز: موتورهای DC معمولاً با شروع نرم و بدون لرزش شروع میشوند. همچنین، میتوانند در آغاز جریان بالایی داشته باشند که در برخی کاربردها مفید است.
4. کنترل دقیق موقعیت و سرعت: موتورهای DC به واسطه بازخورد مکانیکی یا الکتریکی میتوانند دقیقاً موقعیت و سرعت را کنترل کنند، که برای کاربردهایی مانند رباتیک یا دستگاههای CNC مهم است.
معایب
1. نیاز به جاروبکها (در موتورهای جاروبکدار): موتورهای جاروبکدار نیاز به جاروبکها برای تامین اتصال الکتریکی با آرمیچر دارند. این جاروبکها ممکن است با گذر زمان فرسوده شده و نیاز به تعویض داشته باشند.
2. سایش و فرسایش: در موتورهای جاروبکدار، جاروبکها و کموتاتور با گذر زمان ساییده میشوند و این میتواند به فرسایش و کاهش عمر موتور منجر شود.
3. توان کمتر در سرعتهای بالا: در برخی موتورهای DC، توان و گشتاور در سرعتهای بالا کاهش مییابد و این ممکن است در برخی کاربردها محدودیتهایی ایجاد کند.
4. نیاز به بازخورد (در موتورهای سرو): موتورهای سرو نیاز به بازخورد مکانیکی یا الکتریکی برای کنترل دقیق موقعیت و سرعت دارند، که ممکن است هزینه و پیچیدگی را افزایش دهد.
همانطور که مشاهده میشود، موتورهای DC دارای مزایا و معایب خود هستند که بسته به کاربردها و نیازهای مختلف، انتخاب مناسبی خواهند بود.